
Dzisiaj omówię, w jaki sposób zaprojektować regulator obrotów silnika. Pokażę jak zebrać dane pomiarowe, a następnie dokonać ich analizy i obróbki. W trakcie tego procesu wytłumaczę jakich narzędzi używam i w jaki sposób je wykorzystuję.
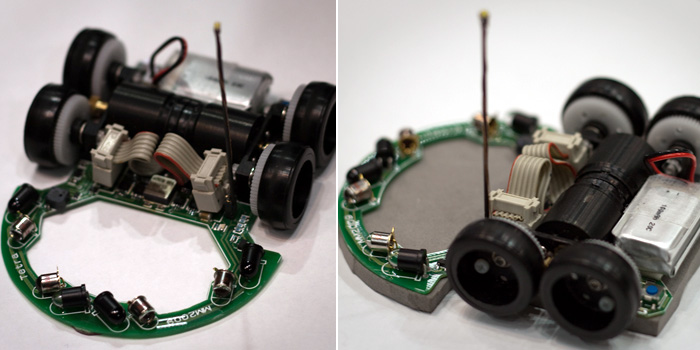
Podobny artykuł napisałem kiedyś na Forbocie – link. Jednak jest kilka istotnych różnic. Przede wszystkim tam był brany pod uwagę sam układ enkoder – silnik bez kół i całej konstrukcji mechanicznej robota. Przez to nie musiałem wtedy walczyć z takimi zakłóceniami i nieliniowościami. Poza tym wtedy wyprowadziłem model na podstawie pomiaru dla jednej wartości wypełnienia. Tutaj wykonuję pomiary dla trzech wartości i patrzę jak wyznaczone modele sprawdzają się dla innych danych pomiarowych.














{kind=link}